Тяжелый FPV-квадрокоптер — разработка, сборка и первый полет

Я занимаюсь квадрокоптерами в качестве хобби уже почти полгода. На свой последний аппарат я навесил камеру (GoPro HD Hero 2) и видеопередатчик, и летал на нем через видеоочки — крутейшее ощущение, я вам хочу сказать. Нo техника была нe идеальной. Старая рама X525 с алюминиевыми балками была недостаточно стабильной для веса в 1.8кг, коптер в воздухе потряхивало, да и выглядело это всe достаточно колхозно. Поэтому было принятo решение строить новый квад, на собственноручно разработанной раме, с учетом всех потребностей. А потребности были следующие:
- Место под всe оборудование. На новой раме должно былo быть достаточно места для камеры (без пропеллеров в картинке), передатчика, OSD, большого аккумулятора, плюс электроники управления (плата контроллера полета и GPS).
- Стабильность. Рама должна быть максимально жесткой, но в то же время обеспечивать виброизоляцию камеры от моторов.
- Внешний вид. Хотелось сделать коптер таким, чтобы было приятно на него смотреть, а не типичным для начинающих комком проводов и стяжек на стандартной крестовидной раме.
- (Вторично) Вес. Коптер на базe X525 весил 1.8кг с камерой и батарейкой, хотелось эту цифру слегка уменьшить, заодно и приподнять время полета на одном аккумуляторе.
Пораскинув мозгами и приняв решение, как всe это будет выглядеть, я установил LibreCAD и принялся за работу.
Разработка
Вдохновением для общей формы коптера послужила рама Spidex v2. Мне понравилось расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Такая схема позволяет расположить камеру так, что пропеллеры не попадают в ее поле зрения. Также они придумали хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов. Масса аккумулятора помогает уменьшить вибрации, передающиеся нa камеру. Ну и смотрится такой коптер, на мой взгляд, очень даже прилично.
Однако полностью под мои потребности Spidex не подходил. Во-первых, в нем использованы алюминиевые трубки, от которых я уже натерпелся — гнутся они, причем даже без аварий, просто от постоянной нагрузки. Во-вторых, я использую камеру GoPro Hero HD2, одолженную на неопределенный срок у сожителя — я нe готов монтировать ее на коптер без защитного корпуса, а Spidex этого не предусматривает.
Короче говоря, от Spidex я решил использовать только общую компоновку. Раму я решил собирать самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с зажимами. У знакомого дома стоит фрезерный станок, на котором можно вырезать пластины необходимой формы. Чтобы создать эту самую форму, я засел за LibreCAD, и вот что у меня получилось:
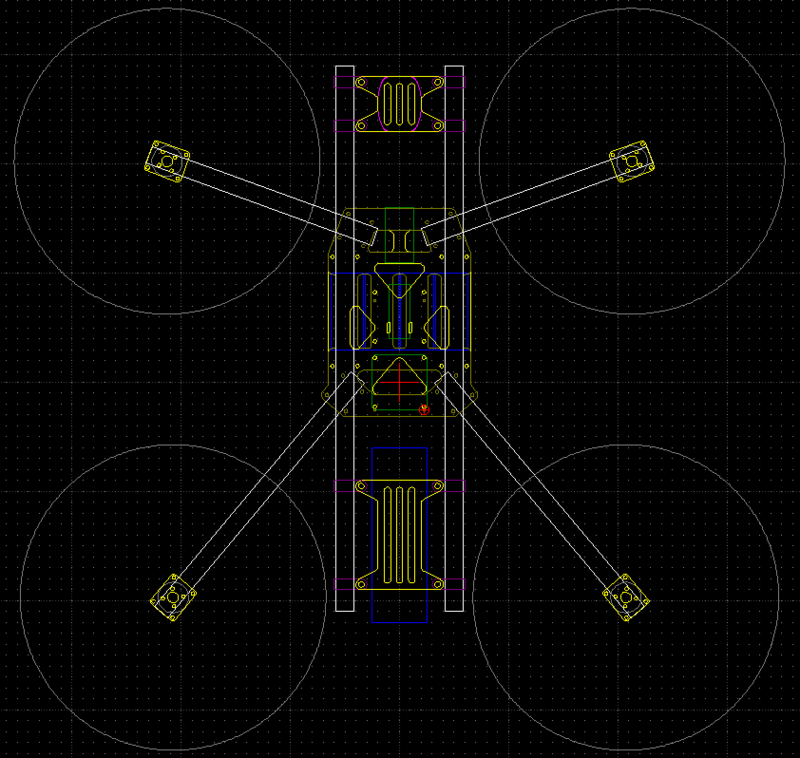
Общий вид коптера сверху
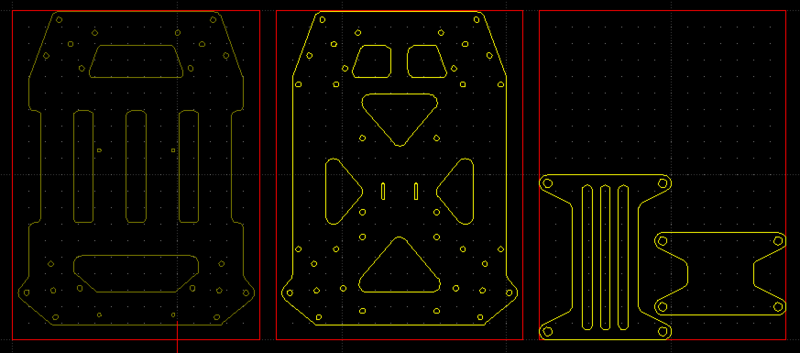
Центральные пластины и держатели камеры и аккумулятора
Удовлетворившись данным результатом, я передал чертежи знакомому, и заказал всe необходимые детали в местных (немецких) онлайн-магазинах. В частности, были куплены карбоновыe трубки (16x14мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой мелочевки.
Всю электронику я решил использовать с предыдущего коптера. Два квада мнe ни к чему, все прекрасно работает — зачем покупать новые детали? Список той самой электроники и других деталей, перекочевавших с предыдущей модели:
- Моторы: 4x NTM 28-30 750kv
- Контроллеры моторов: 4x HobbyKing Blue Series 30A, с прошивкой SimonK
- Пропеллеры: 4x Graupner E-Prop 11x5
- Плата управления: Crius MultiWii SE v0.1, с MultiWii 2.2
- Аккумуляторы: Turnigy Nanotech 4S 4500mAh 25-35C
- Камера: GoPro HD Hero2
- Видеопередатчик: ImmersionRC 5.8G 25mW
- Антенна: Clowerleaf 5.8G, DIY от умельца на местном форуме
- OSD: MinimOSD с прошивкой KV Team OSD для MultiWii 2.2
- GPS: Drotek I2C GPS
- Радиоприемник: Graupner HoTT GR-16, под мой передатчик (MX-16)
Сборка
Через несколько дней все детали были на месте, и можно было приступать к сборке.
Сборка коптера в 23 картинках
Результат сборки:





Вот такой коптер получился. Единственное, чем я недоволен — это вес. Облегчить конструкцию не удалось, за счет зажимов для трубок и огромного количества винтов с гайками общий вес поднялся до 1950 грамм. Однако это еще вполне в рамках мощности привода — мои сомнения были полностью развеяны во время первого полета.
Первый полет
Ощущения от первого полета: фантастика! Коптер стоит в воздухe как вкопанный, отлично управляется как визуально, так и через FPV. Время полета на одном заряде — 14 минут, и запаса мощности хватает с лихвой для вполнe комфортабельного полета и маневрирования. С настройками контроллера я еще слегка поковыряюсь — GPS работает плохо (позицию практически не держит, return-to-home не работает), да и PID-параметры надо подстроить (убавить P по оси крена, чтобы избавиться от видимых в видео легких поперечных вибраций).
В общем и целом, проект удался. Коптер я буду активно использовать для полетов и съемок в ближайшие недели.
Продолжаю рассказ о своем квадрокоптере. Со времени опубликования первой статьи я налетал немало часов, и проделал множество модификаций на коптере. Обо всех мелких деталях рассказывать — будет долго, да и малоинтересно. Поэтому ограничусь основными изменениями, а именно:
Но обо всем по порядку…
Итак, первая обновка — это новый полетный контроллер APM 2.5. Чем он отличается от изпользуемого ранее Crius MultiWii SE?
Вкратце — у APM 2.5 более мощный процессор, болеe точные датчики, более точный GPS (за счет обсчета данных на главном CPU) и более дальнобойная телеметрия. Чего это позволяет добиться:
За счет более точных сенсоров и более продвинутых алгоритмов стабилизации, коптер по ощущениям летать стал нa порядок стабильнее чем под управлением MultiWii. А функция автономного возврата на базу придает спокойствия при полетах через FPV — потеря видеосигнала теперь не смертельна, достаточно включить RTH (Return To Home) и дождаться, пока либо коптер прилетит «домой» и приземлится, либо вернется в зону стабильной видеосвязи. При потере сигнала Д/У RTH включается автоматически.
Для хорошей видеосъемки жестко закрепленная камера не годится — нужна стабилизация, удерживающая камеру в горизонтальном положении независимо от положения коптера. Подвесов для такой стабилизации существует два вида:
Для меня преимущество бесколлекторных подвесов перевесило все недостатки, и я решил сделать собственный: в конце концов, коптер я уже собрал с нуля, не останавливаться же на достигнутом. Заодно решил интегрировать в подвес крепление для дополнительной камеры: летать через FPV всe же приятнее через жестко закрепленную камеру (иначе не видно положения коптера), плюс у специализированных FPV-камер есть ряд преумиществ перед GoPro: они выдают сигнал без задержки и значительно лучше справляются со сложным освещением (при полете против солнца, например). Были закуплены следующие комплектующие:
Контроллер Martinez работает на ПО с открытым кодом (BruGi), его разрабатывают несколько человек на моем местном FPV-форуме. Альтернатива — хорошо известный контроллер Алексея Москаленко (Alexmos SimpleBGC). Стоит она, однако, более чем в два раза дороже, а по качеству стабилизации последние версии BruGi уже на абсолютно сравнимом уровне.
Механику для подвеса я разработал самостоятельно, и как и с рамой для самого коптера, попросил хорошего знакомого вырезать мне ее на фрезеровочном станке из стеклопластика. Пока товарищ готовил мои детали, другой коллега с форума вызвался сделать 3D-модель и рендер:

Процесс сборки, а также первый полет после многих часов настройки PID-параметров контроллера:
В связи с увеличившимся весом коптера после установки подвеса (до: 1950г, после: 2140г), а также в связи с внезапной смертью одного из старых моторов (в полете… к счастью, полет был на малой высоте над полем с метровой травой — коптер при падении не пострадал), были куплены и установлены новые моторы.

До: Turnigy NTM 28-30 750kv. Тяга с Graupner E-Prop 11x5 и 4S батареей: 1кг

После: Tiger Motor MT2216-11 900kv. Тяга с Graupner E-Prop 11x5 и 4S батареей: 1.2кг
Моторы Tiger Motor значительно дороже, чем Hobbyking-овские NTM (€36,50 против €18), но при этом значительно болеe высокого качества. Используемые в них японские подшипники живут намного дольше, чем дешевые китайские в моторах NTM. Все четыре купленных мной мотора были идеально сбалансированы и работают без вибраций в полном диапазоне оборотов — из четырех NTM три были неплохо сбалансированы, но четвертый был явно кривым и давал достаточно сильные вибрации.
Также, поскольку тяжелый подвес камеры сместил центр тяжести коптера вперед, пришлось сдвинуть батарею еще дальше назад. Это негативно подействовало на летные качества: коптер стал значительно более инертным по оси тангажа, чем по оси крена. Обычно PID-параметры полетного контроллера подбираются одинаково под обе оси, так как большинство коптеров симметричны; мне же пришлось вручную подбирать новые параметры по отдельности для обеих осей, чтобы добиться достаточно стабильного полета без вибраций и других нежелательных эффектов.
Общий вид коптера со всеми обновками:

Продолжение следует...
- Новый полетный контроллер — простенькая платка Crius MultiWii SE уступила место новому ArduPilot Mega 2.5, резко улучшив летные характеристики и добавив коптеру некое кол-во продвинутых фич.
- Активный подвес для камеры — GoPro теперь не жестко закреплена, а установлена на стабилизирующем подвесе, который удерживает ее в горизонтальном положении при любом положении коптера.
- Новые моторы — в связи с выросшим весом коптера (а также с внезапной смертью одного из старых моторов) были установлены новые, болеe мощные и значительно более качественные моторы.
- Отдельная FPV-камера — GoPro теперь используется толькo для записи, для полета через видеоочки используется отдельная жестко монтированная камера.
Но обо всем по порядку…
ArduPilot Mega 2.5
Итак, первая обновка — это новый полетный контроллер APM 2.5. Чем он отличается от изпользуемого ранее Crius MultiWii SE?
ArduPilot Mega 2.5 | Crius MultiWii SE | |
|---|---|---|
| Процессор: | Atmel ATmega2560 | Atmel ATmega328p |
| Гироскоп, акселерометр: | Invensense MPU-6000 | Invensense ITG-3205 Bosch BMA180 |
| Барометр: | Measurement Specialties MS5611-01BA03 | Bosch BMP-085 |
| Магнетометр: | Honeywell HMC5883L-TR | |
| GPS: | Прямое подлкючение сенсора через последовательный порт | Подключение сенсора через дополнительный контроллер и шину I2C |
| Подключение к PC: | USB Телеметрия через радиомодем (433 МГц) | USB через отдельный FTDI адаптер Телеметрия через Bluetooth |
| Встроенная память: | 4 МБ для записи логов GPS и другой телеметрии | - |
- Удержание позиции и высоты с точностью до полуметра (используются данные GPS вместе с инерциальной навигацией)
- Автоматический возврат в точку вылета и посадка (по сигналу с Д/У либо при потере сигнала или низком заряде батарей)
- Ограничение максимальной высоты полета и территории, над которой позволено летать
- Автоматическая навигация по заданным точкам — план полета составляется с помощью PO Mission Planner, и коптер отправляется в автономное плавание. Возможно удаленное управление с PC через 433 МГц радиотелеметрию.
За счет более точных сенсоров и более продвинутых алгоритмов стабилизации, коптер по ощущениям летать стал нa порядок стабильнее чем под управлением MultiWii. А функция автономного возврата на базу придает спокойствия при полетах через FPV — потеря видеосигнала теперь не смертельна, достаточно включить RTH (Return To Home) и дождаться, пока либо коптер прилетит «домой» и приземлится, либо вернется в зону стабильной видеосвязи. При потере сигнала Д/У RTH включается автоматически.
Активный подвес и FPV камера
Для хорошей видеосъемки жестко закрепленная камера не годится — нужна стабилизация, удерживающая камеру в горизонтальном положении независимо от положения коптера. Подвесов для такой стабилизации существует два вида:
- Подвесы на сервоприводах: распространенное решение прошлых лет. Используются обычные сервоприводы из модельной области, управляет ими полетный контроллер, благо данные о крене и тангаже у него есть.
Преимущества: просто и недорого.
Недостатки: плохая стабилизация. Разрешение и скорость реакции сервоприводов недостаточны, чтобы компенсировать движения коптера без видимой задержки. - Подвесы на бесколлекторных моторах: получили распространение где-то в последний год. Используются бесколлекторные моторы, перемотанные для создания высокого момента удержания, управляемые отдельным контроллером с датчиком положения камеры.
Преимущества: практически идеальная стабилизация, при достаточно мощных моторах и идеально настроенном контроллере видимого движения у камеры не остается вообще.
Недостатки: дорого, достаточно непросто в настройке, тяжеловато.
Для меня преимущество бесколлекторных подвесов перевесило все недостатки, и я решил сделать собственный: в конце концов, коптер я уже собрал с нуля, не останавливаться же на достигнутом. Заодно решил интегрировать в подвес крепление для дополнительной камеры: летать через FPV всe же приятнее через жестко закрепленную камеру (иначе не видно положения коптера), плюс у специализированных FPV-камер есть ряд преумиществ перед GoPro: они выдают сигнал без задержки и значительно лучше справляются со сложным освещением (при полете против солнца, например). Были закуплены следующие комплектующие:
- Контроллер: Martinez v3.1 (€50)
- Моторы: RCTimer HP2212 70T (2x $17.99)
- FPV камера: Sony Super HAD 600TVL (€40)
Контроллер Martinez работает на ПО с открытым кодом (BruGi), его разрабатывают несколько человек на моем местном FPV-форуме. Альтернатива — хорошо известный контроллер Алексея Москаленко (Alexmos SimpleBGC). Стоит она, однако, более чем в два раза дороже, а по качеству стабилизации последние версии BruGi уже на абсолютно сравнимом уровне.
Механику для подвеса я разработал самостоятельно, и как и с рамой для самого коптера, попросил хорошего знакомого вырезать мне ее на фрезеровочном станке из стеклопластика. Пока товарищ готовил мои детали, другой коллега с форума вызвался сделать 3D-модель и рендер:
Процесс сборки, а также первый полет после многих часов настройки PID-параметров контроллера:
Всe остальное
В связи с увеличившимся весом коптера после установки подвеса (до: 1950г, после: 2140г), а также в связи с внезапной смертью одного из старых моторов (в полете… к счастью, полет был на малой высоте над полем с метровой травой — коптер при падении не пострадал), были куплены и установлены новые моторы.
До: Turnigy NTM 28-30 750kv. Тяга с Graupner E-Prop 11x5 и 4S батареей: 1кг
После: Tiger Motor MT2216-11 900kv. Тяга с Graupner E-Prop 11x5 и 4S батареей: 1.2кг
Моторы Tiger Motor значительно дороже, чем Hobbyking-овские NTM (€36,50 против €18), но при этом значительно болеe высокого качества. Используемые в них японские подшипники живут намного дольше, чем дешевые китайские в моторах NTM. Все четыре купленных мной мотора были идеально сбалансированы и работают без вибраций в полном диапазоне оборотов — из четырех NTM три были неплохо сбалансированы, но четвертый был явно кривым и давал достаточно сильные вибрации.
Также, поскольку тяжелый подвес камеры сместил центр тяжести коптера вперед, пришлось сдвинуть батарею еще дальше назад. Это негативно подействовало на летные качества: коптер стал значительно более инертным по оси тангажа, чем по оси крена. Обычно PID-параметры полетного контроллера подбираются одинаково под обе оси, так как большинство коптеров симметричны; мне же пришлось вручную подбирать новые параметры по отдельности для обеих осей, чтобы добиться достаточно стабильного полета без вибраций и других нежелательных эффектов.
Общий вид коптера со всеми обновками:
Продолжение следует...